
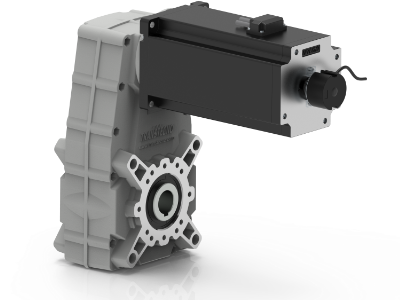
Motoriduttori BLDC Traction pendolari serie FT
Motoriduttori pendolari a corrente continua brushless
Le caratteristiche principali dei motoriduttori brushless cc pendolari della serie FT sono:
- Alimentazione in bassa tensione 24/48 Vcc
- Motore protezione IP65
- Coppie motore disponibili da 0,7 a 4.2 Nm
- Carcasse dei riduttori in pressofusione di alluminio
- Lubrificazione permanente con olio sintetico
- Ingranaggi cilindrici a denti elicoidali, induriti e rettificati
- Disponibili per accoppiamento ingresso motore con giunto oppure con morsetto calettatore
- Disponibili anche con anello di tenuta ingresso in viton

Designazione
RIDUTTORE
| FT | 105 | U | 46 | U |
|---|---|---|---|---|
| Tipo
|
Grandezza | Versione riduttore | Rapporto | Albero di uscita |
| FT | 105 146 196 |
U | Vedere tabelle | Vedere tabelle |
MOTORE
| BL070.48.80 | 48V | Encoder |
|---|---|---|
| Tipo | Tensione | Opzioni |
| BL070.48.80 BL200.48.95 BL400.48.120 |
48V-24V 48V-24V 48V-24V |
MEHR 22 HREA 48 |
Lubrificazione e temperatura
Tutti i motoriduttori FT sono forniti completi di lubrificante sintetico (viscosità 320) e non necessitano di manutenzione.
Temperatura ambiente 0 ÷ 40 °C (in assenza di congelamento ed in assenza di condensa).
Per temperature diverse, contattare nostro UT.
Carichi radiali

| n2 [min-1] |
R2 [N] | ||
| FT105 | FT146 | FT196 | |
| 200 | 1000 | 1600 | 2250 |
| 175 | 1040 | 1700 | 2300 |
| 150 | 1100 | 1800 | 2500 |
| 125 | 1160 | 1900 | 2700 |
| 100 | 1250 | 2000 | 2900 |
| 90 | 1300 | 2200 | 3100 |
| 80 | 1400 | 2400 | 3300 |
| 70 | 1500 | 2500 | 3500 |
| 60 | 1550 | 2550 | 3700 |
| 50 | 1600 | 2600 | 3850 |
| 40 | 1700 | 2700 | 4000 |
| 30 | 1850 | 2850 | 4600 |
| 20 | 2000 | 3000 | 5500 |
| 10 | 2000 | 3000 | 7000 |
| 5 | 2000 | 3000 | 7000 |
Quando il carico radiale risultante non è applicato sulla mezzeria dell’albero occorre calcolare quello effettivo con la seguente formula:


a,b = valori riportati nella tabella
| FT | |||
| FT105 | FT146 | FT196 | |
| a | 82 | 82.5 | 132 |
| b | 62 | 62.5 | 102 |
| R2MAX | 2000 | 3000 | 7000 |
| MODELLO | POLI | FASI | Tensione nominale |
Velocità nominale |
Coppia nominale |
Potenza nominale |
Coppia di picco |
Corrente nominale |
|---|---|---|---|---|---|---|---|---|
| [V] | [min-1] | [mNm] | [W] | [Nm] | [A] | |||
| BL070.48.80 | 8 | 3 | 48 | 4350 | 0.7 | 320 | 2.1 | 12 |
| 24 | 2500 | 185 |
| MODELLO | Corrente di picco |
Resistenza fase-fase |
Induttanza fase-fase |
Costante di coppia |
Costante FCEM |
Inerzia rotore |
Peso |
|---|---|---|---|---|---|---|---|
| [A] | [Ω] | [mH] | [Nm/A] | [V/kRPM] | [gcm2] | [kg] | |
| BL070.48.80 | 36 | 0.072 | 0.304 | 0.059 | 6.15 | 1000 | 1.8 |
| MODELLO | POLI | FASI | Tensione nominale |
Velocità nominale |
Coppia nominale |
Potenza nominale |
Coppia di picco |
Corrente nominale |
|---|---|---|---|---|---|---|---|---|
| [V] | [min-1] | [mNm] | [W] | [Nm] | [A] | |||
| BL070.48.80 | 8 | 3 | 48 | 4350 | 0.7 | 320 | 2.1 | 12 |
| 24 | 2500 | 185 |
| MODELLO | Corrente di picco |
Resistenza fase-fase |
Induttanza fase-fase |
Costante di coppia |
Costante FCEM |
Inerzia rotore |
Peso |
|---|---|---|---|---|---|---|---|
| [A] | [Ω] | [mH] | [Nm/A] | [V/kRPM] | [gcm2] | [kg] | |
| BL070.48.80 | 36 | 0.072 | 0.304 | 0.059 | 6.15 | 1000 | 1.8 |
| MODELLO | POLI | FASI | Tensione nominale |
Velocità nominale |
Coppia nominale |
Potenza nominale |
Coppia di picco |
Corrente nominale |
|---|---|---|---|---|---|---|---|---|
| [V] | [min-1] | [mNm] | [W] | [Nm] | [A] | |||
| BL200.48.95 | 8 | 3 | 48 | 3000 | 2.0 | 650 | 6 | 23 |
| 24 | 1500 | 300 |
| MODELLO | Corrente di picco |
Resistenza fase-fase |
Induttanza fase-fase |
Costante di coppia |
Costante FCEM |
Inerzia rotore |
Peso |
|---|---|---|---|---|---|---|---|
| [A] | [Ω] | [mH] | [Nm/A] | [V/kRPM] | [gcm2] | [kg] | |
| BL200.48.95 | 69 | 0.077 (+/-15%) | 0.228 | 0.091 | 6.7 (+/-10%) | 2820 | 6 |
| MODELLO | POLI | FASI | Tensione nominale |
Velocità nominale |
Coppia nominale |
Potenza nominale |
Coppia di picco |
Corrente nominale |
|---|---|---|---|---|---|---|---|---|
| [V] | [min-1] | [mNm] | [W] | [Nm] | [A] | |||
| BL200.48.95 | 8 | 3 | 48 | 3000 | 2.0 | 650 | 6 | 23 |
| 24 | 1500 | 300 |
| MODELLO | Corrente di picco |
Resistenza fase-fase |
Induttanza fase-fase |
Costante di coppia |
Costante FCEM |
Inerzia rotore |
Peso |
|---|---|---|---|---|---|---|---|
| [A] | [Ω] | [mH] | [Nm/A] | [V/kRPM] | [gcm2] | [kg] | |
| BL200.48.95 | 69 | 0.077 (+/-15%) | 0.228 | 0.091 | 6.7 (+/-10%) | 2820 | 6 |
| MODELLO | POLI | FASI | SERVIZIO | Tensione nominale |
Velocità nominale |
Coppia nominale |
Potenza nominale |
Coppia di picco |
Corrente nominale |
|---|---|---|---|---|---|---|---|---|---|
| [V] | [min-1] | [mNm] | [W] | [Nm] | [A] | ||||
| BL400.48.120 | 8 | 3 | S3 | 48 | 3000 | 4.2 | 1320 | 12.6 | 33 |
| S1 | 3.5 | 1100 | 10.5 | 28 | |||||
| S3 | 24 | 1400 | 4.2 | 615 | 12.6 | 33 | |||
| S1 | 3.5 | 615 | 10.5 | 28 |
| MODELLO | Corrente di picco |
Resistenza fase-fase |
Induttanza fase-fase |
Costante di coppia |
Costante FCEM |
Inerzia rotore |
Peso |
|---|---|---|---|---|---|---|---|
| [A] | [Ω] | [mH] | [Nm/A] | [V/kRPM] | [gcm2] | [kg] | |
| BL400.48.120 | 99 | 0.064 | 0.31 | 0.120 | 12.6 | 21380 | 11 |
| 84 | |||||||
| 99 | |||||||
| 84 |
Dimensioni





Descrizione
MEHR 22 è un encoder ottico e magnetico incrementale; è dotato di un albero cavo e può essere fissato in differenti taglie di motori elettrici.
Questo encoder è stato specificatamente sviluppato per lavorare con motori Brushless, in applicazioni retroazionate e per il controllo della velocità di rotazione.
L’encoder MEHR 22 ha un sistema di controllo in tempo reale per le applicazioni in velocità e posizione.
Questo encoder fornisce in uscita due onde quadre in quadratura (A-B sfasate di 90°) per le informazioni di conteggio e di direzione ed un terzo canale con un impulso giro (tacca di zero).
In aggiunta c’è un encoder magnetico integrato che fornisce un segnale UVW di commutazione. La risoluzione dell’encoder è determinata dal numero di cicli per rotazione (CPR). L’alimentazione e il segnale sono forniti da un connettore JAE a 11 pin
Caratteristiche principali:
- Canali di uscita encoder: A-B-I e /A-/B-/I
- Canali di uscita sensore Hall: U-V-W e /U-/V-/W
- Tipo di uscita: Line Driver/TTL/RS-422
- Risoluzione encoder: 2000 CPR (Cycles Per Revolution)
- Risoluzione sensore Hall: 8 poli
- Frequenza: 400kHz cavo corto (<1m), tipica 180kHz @2.000cpr -> 5.400 min-1
- Alimentazione: 5 VDC
- Dimensioni compatte: 39.0 mm (diametro) x 20.1 mm (lunghezza)
- Temperatura di funzionamento: da -40°C a +100°C
- Conforme alla direttiva 2011/65/65/EU e 2015/863/EU
Descrizione
HREA 48 è un encoder + sensori di hall ottico ad albero cavo.
Questo encoder è stato specificatamente sviluppato per avere un basso costo e lavorare in applicazioni AGV, nelle quali precisione e velocità sono fondamentali.
L’encoder fornisce due uscite ad onda quadra A e B ed il loro negato /A-/B, Il segnale I ed il suo negato /I rappresenta la tacca di”ZERO”, l’utilizzo dei sensori di hall ad 8 poli U-V-W ed i suoi negati /U-/V-/W permette un elevata precisione e controllo.
L’alimentazione dei segnali sono forniti da un cavo intrecciato 14Pin 100cm.
Caratteristiche principali:
- Canali di uscita encoder: A-B-Ie /A-/B-/I
- Canali di uscita sensore Hall: U-V-W e /U-/V-/W
- Tipo di uscita: Line Driver/TTL/RS-422
- Risoluzione encoder: 2000 CPR (Cycles Per Revolution)
- Risoluzione sensore Hall: 8 poli
- Frequenza 300 Khz
- Alimentazione: 5 VDC
- Dimensioni compatte: 48,0 mm (diametro) x 37,0mm (lunghezza)
- Temperatura di funzionamento: da -40°C a +85°C
- Conforme alla direttiva 2011/65/65/EU e 2015/863/EU

Descrizione
BLD60 Digital è un controller di velocità ad anello chiuso che utilizza componenti di potenza IGBT e MOSFET. Utilizza i segnale di Hall del motore brushless per eseguire il controllo della velocità ad anello chiuso, e riduce l’errore tramite al regolatore dei PID. E’ in grado di raggiungere la coppia massima anche alle basse velocità da 150 a 4000 giri al minuto.
Il drive utilizza il protocollo ModbusRS485 RTU per poter comunicare i parametri e gestire i motori su di un Network.
Caratteristiche principali:
- Regolatore di velocità PID , Regolatore di corrente a doppio anello
- Frequenza di chopper 20KHZ
- Arresto ad azione rapida
- Funzione di allarme di guasto: segnale di sovratensione, sottotensione, sovracorrente, sovratemperatura e sensori di hall difettosi
Setup & Taratura
| MOTORE | ENCODER | DOWNLOAD SETUP |
|---|---|---|
| BL070.48.80 | HREA48 | Scarica il PDF |
| BL070.48.80 | MEHR22 | Scarica il PDF |
| BL200.48.95 | HREA48 | Scarica il PDF |
| BL200.48.95 | MEHR22 | Scarica il PDF |
| BL400.48.120 | HREA48 | Scarica il PDF |
| BL400.48.120 | MEHR22 | Scarica il PDF |

Descrizione
BLDT60 DIGITAL PLUS è un controller completamente digitale che funziona in modalità coppia, velocità o posizione ed utilizza la Space Vector Modulation (SVM), che si traduce in un maggiore utilizzo della tensione del bus e una ridotta dissipazione del calore rispetto al PWM tradizionale.
L’azionamento può essere configurato per una varietà di segnali e di comando esterni.
I comandi possono anche essere configurati utilizzando il Motion Engine integrato nell’azionamento, in modo da gestire il movimento tramite il processore interno.
Oltre al controllo del motore, questi azionamenti dispongono di ingressi e uscite digitali e analogiche dedicati e programmabili per migliorare l’interfacciamento con controller e dispositivi esterni.
Tramite il protocollo di comunicazione RS232/485 o Modbus RTU può gestire e comunicare in un network fornendo dati o gestendoli per il controllo puntuale del motore.
Caratteristiche principali:
- Funzionamento rigenerativo a quattro quadranti
- Tecnologia Space Vector Modulation (SVM)
- Design completamente digitale all’avanguardia
- Impostazioni di guadagno programmabili
- Limiti di corrente, tensione, velocità e posizione completamente configurabili
- PIDF Velocity Loop
- Anello di posizione PID + FF
- Dimensioni compatte, alta densità di potenza
- Hardware da analogico a digitale a 16 bit
- Commutazione della modalità “On-the-fly”
- Cambio di impostazione del guadagno “On-the-fly”
- Ingressi Safe Torque Off (STO) dedicati
Catalogo
pendolari
FT